



Компания Google DeepMind анонсировала новый ИИ-модуль Gemini Robotics On-Device, способный управлять роботами локально, без подключения к интернету. Это значительное развитие мартовской версии Gemini Robotics, которая требовала «облачного» взаимодействия.
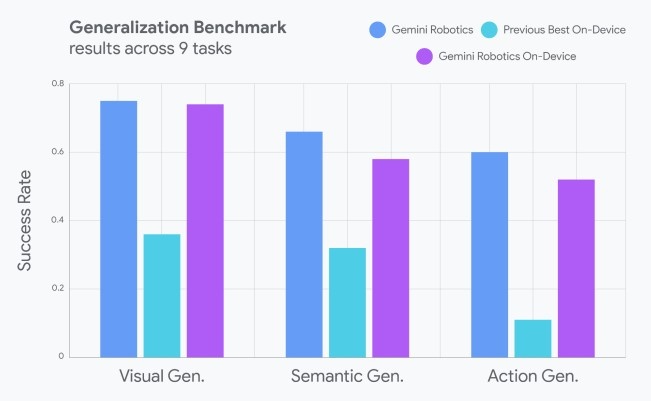
Новая модель позволяет управлять движениями роботов с помощью текстовых команд, а также адаптировать поведение под конкретные задачи. Google утверждает, что производительность On-Device версии практически не уступает «облачной».
В демонстрации были показаны роботы, выполняющие задачи вроде распаковки сумок и складывания одежды. Изначально модель обучалась на роботах ALOHA, но позже была успешно адаптирована к двурукому Franka FR3 и гуманоидному Apollo от Apptronik.
Особенно впечатляет то, что Franka FR3 смог выполнять новые задачи, такие как сборка на производственной линии, без предварительного обучения на аналогичных сценариях.
DeepMind также выпустила SDK для Gemini Robotics, позволяющий разработчикам обучать роботов на базе моделей с использованием физического симулятора MuJoCo. Для обучения достаточно 50–100 демонстраций, что значительно снижает барьер входа в разработку роботов с ИИ.
Источник: TechCrunch





